理工學院錢輝環教授團隊獲IROS最佳應用論文提名
? ? ? ?摘要
? ? ? ?近日,機器人與智能系統領域最著名、影響力最大的頂級學術會議—— IEEE智能機器人與系統國際會議(IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS)正式召開。
? ? ? ?香港中文大學(深圳)理工學院錢輝環教授團隊兩篇論文被本屆IROS接收,其中關于自主帆船的研究還被提名為最佳應用論文。
? ? ? ?
? ? ? ?會議簡介
? ? ? ?IEEE智能機器人與系統國際會議(IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS) 是機器人與智能系統領域最著名、影響力最大的頂級學術會議。
? ? ? ?作為國際機器人與自動化領域的兩大影響最大的學術會議之一,自機器人技術發展初期的 1988 年開始,IROS 每年舉辦一屆。每年,來自世界各個頂尖機器人研究機構的專家和業界人士匯聚在這個盛會,探討和展示機器人行業最前沿的技術。受疫情影響,本該在拉斯維加斯舉行的 IROS 2020 改在線上舉辦,并且史無前例的通過線上免費向公眾開放。
?
? ? ? ?研究介紹
? ? ? ?1.OceanVoy: A Hybrid Energy Planning System for Autonomous Sailboat
? ? ? ?(OceanVoy: 一種面向自主帆船的混合能源控制系統)
? ? ? ?第一作者:理工學院三年級博士研究生孫欽波
? ? ? ?通訊作者:錢輝環教授
? ? ? ?這篇論文被提名為IROS最佳應用論文
? ? ? ??研究背景
? ? ? ?自主帆船是一種依靠風提供動力的水面機器人。面向長航時遠距離的航行,其能源規劃是極其重要的一個環節,控制對象包括帆和舵。通過有效的能源規劃,將進一步增強自主帆船長航程長航時的優勢。然而,目前在自主帆船的能源優化方面,相關研究較少。現階段,機器人能源優化一般可分為三個方面:機械設計優化、微處理器系統優化以及算法優化。其中算法優化主要包括:運動規劃和能源調度。本文主要在運動規劃層面展開,研究自主帆船的能源優化。
? ? ? ?論文簡介
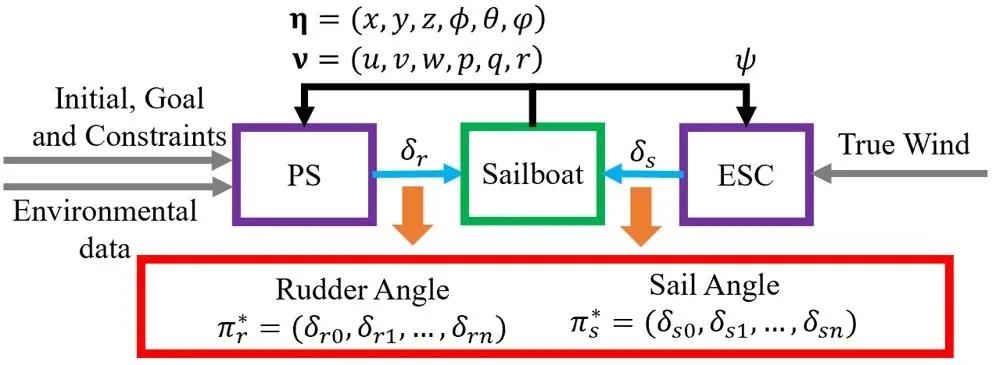
? ? ? ?在本研究中,我們提出了一種混合控制方法并將其應用于自主帆船 OceanVoy 的能源規劃。該混合控制方案包括:偽譜(PS: Pseudo-spectral)最優控制方法用于航向控制,以及極限搜索控制(ESC: Extreme Seeking Control)用于風帆調節。我們通過混合控制方案來得到優化后的路徑以及對應的電機控制序列,其中包含了帆船的舵和帆的控制序列。研究通過仿真和實驗對上述方案進行了驗證,結果表明在該方案下的帆船的運動規劃和能量規劃是有效的。通過對不同場景的能源情況統計,該方案可節省約7%的能源。

?
? ? ? ?作者簡介

孫欽波
理工學院三年級博士生研究生
? ? ? ?本文第一作者為香港中文大學(深圳)理工學院三年級博士生孫欽波,其主要研究方向為機器人能源規劃以及自主帆船機器人系統,其導師為錢輝環教授。
?
? ? ? ?2.A Two-stage Automatic Latching System for The USVs Charging in Disturbed Berth
? ? ? ?面向無人船在擾動環境下自主充電任務的兩階段對接系統
? ? ? ?共同第一作者:理工學院三年級博士研究生薛凱文,理工學院二年級博士研究生劉崇鋒
? ? ? ?通訊作者:錢輝環教授
? ? ? ?研究背景
? ? ? ?無人船以其優越的機動性能,良好的布放回收,可以高效地進行各種水面任務。無人船的自動駕駛及其相關技術,對于提高船舶領域的智能化水平和促進相關行業的發展,至關重要。但其由于續航時間短,在推廣方面造成了阻礙。因此,本研究主要針對無人船長時間作業的續航需求,解決水面擾動帶來的困難,研究一套供無人船自主停泊充電的系統,進而提高無人船的智能化水平和相關行業的發展。
? ? ? ?論文簡介
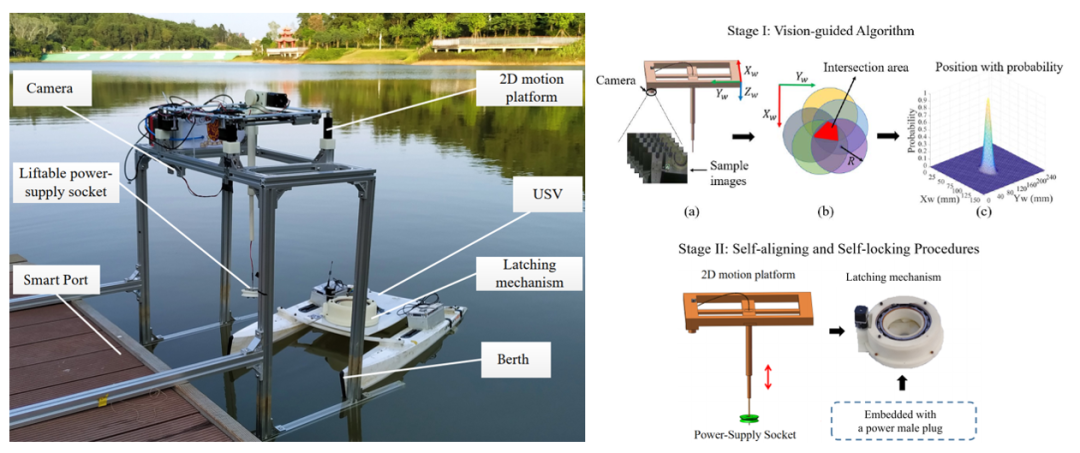
? ? ? ?本文研究船舶自主停泊充電的關鍵技術,通過在擾動情況下對于船體運動信息的捕捉,估計對接裝置的接口位置,求得最優的充電位置。隨后通過機械設計,保證充電對接裝置連接穩定可靠。通過水面實驗,驗證了系統的有效性,并大大提高了對接的成功率。
? ? ? ?作者簡介

薛凱文
理工學院三年級博士生研究生
? ? ? ?本文共同第一作者為香港中文大學(深圳)理工學院三年級博士研究生薛凱文,其研究領域為智能機器人、自動駕駛、增強學習、視覺感知,其導師為錢輝環教授。

劉崇鋒
理工學院二年級博士生研究生
? ? ? ?本文共同第一作者為香港中文大學(深圳)理工學院二年級博士研究生劉崇鋒,其研究領域為機器人系統設計、運動控制、無人船,目前從事機艇協同相關研究,其導師為錢輝環教授。
?
? ? ? ?導師簡介

錢輝環
理工學院助理教授
AIRS副院長
? ? ? ?錢輝環教授2004年在中國科技大學獲得工學學士。他于同年加入香港中文大學自動化與計算機輔助工程學學系,擔任助理研究員。2010年獲得自動化與計算機輔助工程學哲學博士學位。此后在機械與自動化工程學系,歷任副研究員、研究助理教授。2015年加入香港中文大學(深圳),兼任機器人與智能制造國地聯合工程實驗室副主任。
? ? ? ?錢教授發表了2部專著、1部編著、90余篇國際期刊以及國際會議論文,并取得6項已獲授權的專利。他正主持1項國家自然科學基金重點類項目;主持完成2項香港特區政府資助的項目,并作為核心成員參與完成了10項在香港和內地的項目。由于其在全方位汽車轉向界面方面的工作,錢教授和他的科研團隊獲得IEEE/ASME 機電一體化學報的2011年度最佳論文獎。他的研究方向包括機器人與智能系統。