理工學院師生共7篇論文被機器人與智能系統領域頂會之一IROS 2025接收
近日,香港中文大學(深圳)理工學院共有7篇論文被IEEE智能機器人與系統國際會議(IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2025)接收。
在被接收的論文中,作者包括理工學院:
在讀碩士生—成就、林澤昕、王陳煒、吳東昊
在讀博士生—李紹銘、錢程、王浩、徐映天
碩士畢業生—蔡昌亨、萬瀚文
博士畢業生—季廣霖
通訊作者或指導老師為理工學院朱建副教授、孫正隆助理教授、鐘仿洵助理教授、冀曉強研究助理教授。
?
會議介紹
IEEE智能機器人與系統國際會議(IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS) 是機器人與智能系統領域最著名、影響力最大的頂級學術會議。?
作為國際機器人與自動化領域的兩大影響最大的學術會議之一,自機器人技術發展初期的1988年開始,IROS每年舉辦一屆。每年,來自世界各個頂尖機器人研究機構的專家和業界人士匯聚在這個盛會,探討和展示機器人行業最前沿的技術。IROS 2025共收到來自66個國家/地區的4306篇論文投稿,以及來自IEEE期刊(TRO, RAL, RAM, TASE, TIE, TII, TMech)轉載的論文777篇,最終接收論文共計1991篇,接收率為46%。
?
論文介紹
論文一
題目:Modeling of Viscoelastic Liquid Crystal Elastomer Actuators
摘要:近年來,傳統導管技術已在神經介入手術中展現出臨床實用性,但腦血管系統的曲折性對外科醫生的專業技能提出了極高的要求,需要通過手動操作克服復雜的解剖結構。為了通過降低技術門檻和優化手術效率來推進神經介入實踐,實現具有更高靈活性的主動可操控導管已成為一項關鍵目標。液晶彈性體作為軟體驅動器具有大變形和多種驅動模式等獨特特性,有助于實現柔性醫用微導管的可控彎曲,提高其在醫療過程中的可操作性。然而該驅動器表現出明顯的遲滯特性,其建模控制有很大挑戰。本文提出了一個動力學模型來描述光激勵液晶彈性體驅動器的非線性時變表現。首先建立輸入激光功率與軟驅動器溫度響應的非線性關系,并應用粘彈性模型擬合其形變的遲滯特性,然后基于伸縮型驅動器,采用灰箱模型辨識算法擬合未知參數,驗證了該模型的可靠性,最終應用于彎曲型驅動器中,實現了較好的前饋控制效果。此外,該工作也為未來多驅動器組合的全向彎曲微導管的實時控制奠定了基礎。
?
理工學院參與作者:
第一作者:王浩,2020級計算機與信息工程專業在讀博士生。
通訊作者:朱建,香港中文大學(深圳)理工學院副教授,深圳市人工智能與機器人研究院兼職研究員。
?
論文二
題目:Multimodal Deformation Estimation of Soft Pneumatic Gripper During Operation
摘要:許多機器人任務都需要知曉機器人精確的三維幾何結構,然而,軟體機器人的結構無法通過一組有限的可測參數(如關節角度和連桿長度)推算。這就使得精確掌握軟體機器人三維幾何形態極為困難,難以完成復雜的接觸型操作任務,阻礙了廣泛使用。為攻克這一難題,我們首先設計了能夠突破傳統單軸彎曲的局限的雙腔道氣動執行器,其具有高自由度和腔室間耦合交互的特性。其次,我們提出了一種低成本且低侵入性的傳感器設置模式,復用腕部攝像頭視覺信號并使用尖端IMU信號融合補足,再基于物理模型和數據可得性計算夾爪的幾何點云模型,本體感受幾何分辨率(PGR)達到558;然后,我們使用結合了注意力機制LSTM網絡的深度學習架構融合多模態進行形態學重建。我們的方法關鍵點預測的平均誤差為 3.67 毫米(方差為 8.39),相比之下,僅使用視覺信號的平均誤差為 4.36 毫米(方差 10.47),而僅使用IMU的平均誤差為9.32 毫米(方差 21.29)。這項工作為軟體機器人在復雜環境中的自主操作提供了新的可能性,為服務機器人、康復機器人及人機協作等領域的實際應用鋪平了道路。
?
理工學院參與作者:
第一作者:蔡昌亨,2025屆計算機與信息工程專業碩士畢業生。
通訊作者:朱建,香港中文大學(深圳)理工學院副教授,深圳市人工智能與機器人研究院兼職研究員。
?
論文三
題目:Towards Fully Autonomous Robotic Ultrasound-guided Biopsy for Superficial Organs
摘要:為應對超聲引導治療中對醫生技能高度依賴、培訓成本高及專業醫師短缺等挑戰,該工作提出了一種面向淺表器官穿刺的自主機器人系統。該系統集成了超聲探頭與自動進針機構,可在無需人工干預的情況下,按照臨床操作流程完成實時圖像導航與穿刺取樣操作。通過非線性優化方法,系統實現了2D超聲圖像與3D體積數據之間的實時切片-體積配準,并輔助醫生選擇目標圖像平面。在精準定位目標后,系統自主完成穿刺與取樣流程。
系統整體設計充分結合了臨床操作規范與3D解剖先驗,實現了從圖像獲取、配準導航到穿刺執行的完整閉環。本文還提出了一種在精度與實時性之間取得平衡的導航方法,顯著提升了目標定位的準確性與穿刺的可靠性。實驗驗證結果表明,該系統在多種場景下均表現出良好的可行性、魯棒性與泛化能力,為超聲引導治療的智能化與自動化提供了全新解決方案。該工作為面向實際應用的智能醫療機器人系統提供了有力支撐。
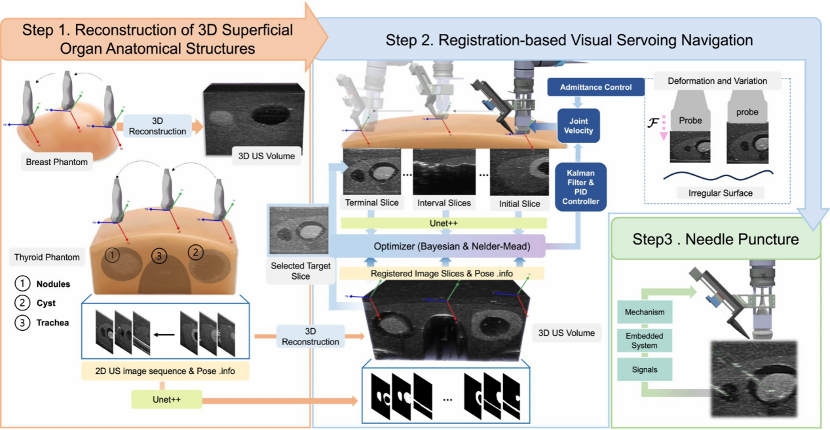
圖:自主超聲引導穿刺活檢工作流程:1)3D解剖結構預處理;2)基于配準的視覺伺服和導航;3)細針穿刺活檢
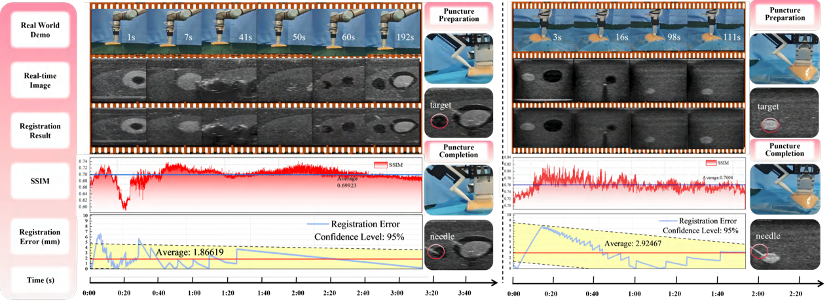
圖:多淺表器官體模(左:甲狀腺,右:乳腺)全流程實驗評估
?
理工學院參與作者:
第一作者:王陳煒,2023級計算機與信息工程專業在讀碩士生。
共同一作:錢程,2024級計算機與信息工程專業在讀博士生。
通訊作者:孫正隆,香港中文大學(深圳)理工學院助理教授,校長青年學者,博士研究生導師。
?
論文四
題目:High-dynamic Tactile Sensing for Tactile Servo Manipulation: Let Robots Swing a Hammer
摘要:本研究聚焦于高動態觸覺感知與伺服控制的實時性與魯棒性挑戰,以機器人釘釘子任務為例,通過允許錘子在剛性雙指夾爪中受控滑動,指間的觸覺系統能夠實時感知連續滑動,并據此動態調節夾緊力。動態滑動觸覺伴隨著震動與高頻信號,觸覺傳感器感知頻率為1 kHz,論文采用短時傅里葉變換(STFT)與雙流物理知識引導機器學習(PIML)模型,提取高頻觸覺特征并降低反饋延遲,平均延遲僅為1.04 ms。系統采用鼓勵旋轉滑動增強沖擊力并吸收反沖,抑制平行滑動以維持夾持穩定性的動態調整策略。
實驗表明,該方法相比傳統將錘子剛性固定的方式,在增強沖擊力(提升179.97%,從28.06 N提升至78.56 N)和減少反沖(下降64.26%,從223.30 N降至79.81 N)方面表現顯著。該方法還適配不同質量分布的錘子,展現出優越的操作靈活性和動態適應能力。研究成果為高動態觸覺交互任務提供了有效的新思路。
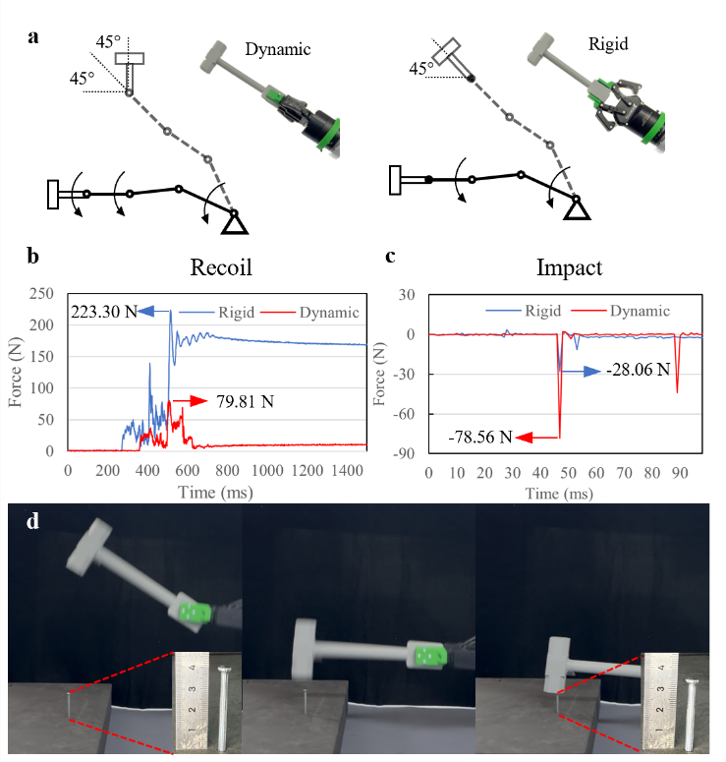
圖:錘擊過程中動態握持與剛性握持的受力比較
?
理工學院參與作者:
第一作者:徐映天,2021級計算機與信息工程專業博士研究生,研究方向為機器人觸覺感知與應用。
通訊作者:孫正隆,香港中文大學(深圳)理工學院助理教授,校長青年學者,博士研究生導師。
?
論文五
題目:An Open-Source Snake Hole-Digging Inspired Safety-Critical Insertion Planning and Replanning Framework for Continuum Robots
摘要:本論文提出了一種受蛇類挖洞行為啟發的開源安全關鍵插入規劃與重規劃框架,用于多節段連續體機器人在動態環境中的運動控制。論文的主要貢獻包括:蛇類挖洞行為(圖4)啟發的最優插入規劃框架:與傳統的前導跟隨(FTL)運動不同,該框架利用所有節段調整整體構型,而不僅依賴遠端節段引導運動。通過逆向運動規劃(Algorithm 1),機器人在插入過程中逐步擬合預規劃的最終形狀,顯著降低了與目標路徑的平均偏差,與傳統方法相比提升75.36%)。
實時全局避障與目標跟蹤:通過將控制屏障函數(CBF)和控制李雅普諾夫函數(CLF)集成到二次規劃(QP)框架中(CLF-CBF-Q),實現了動態障礙物環境下的在線運動重規劃。實驗顯示,CLF-CBF-QP在移動障礙物干擾下仍能保證機器人末端到達目標位置(圖7),其平均誤差比僅用CBF-QP降低了48.43%。?
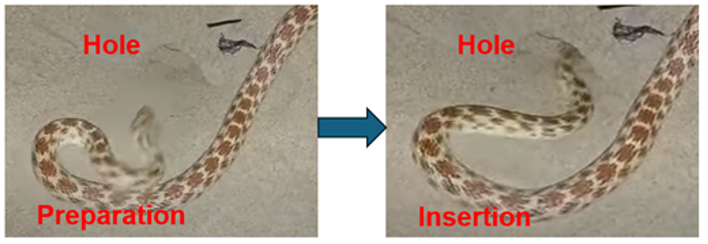
圖:蛇類挖洞行為
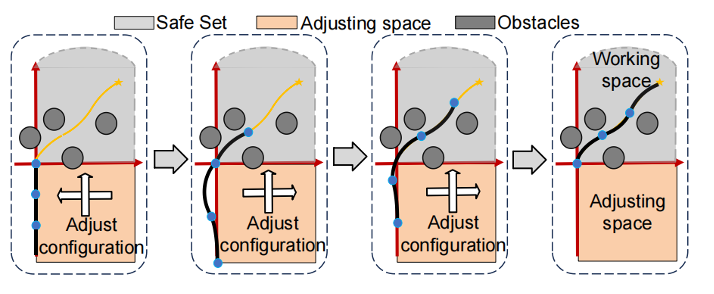
圖:利用Adjusting space調整全局位姿
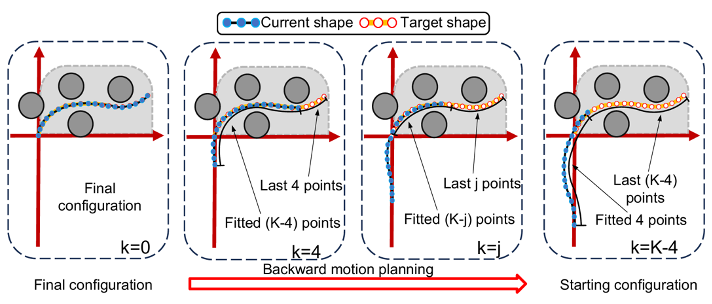
圖:逆向運動規劃:從最終姿態規劃到初始姿態全過程
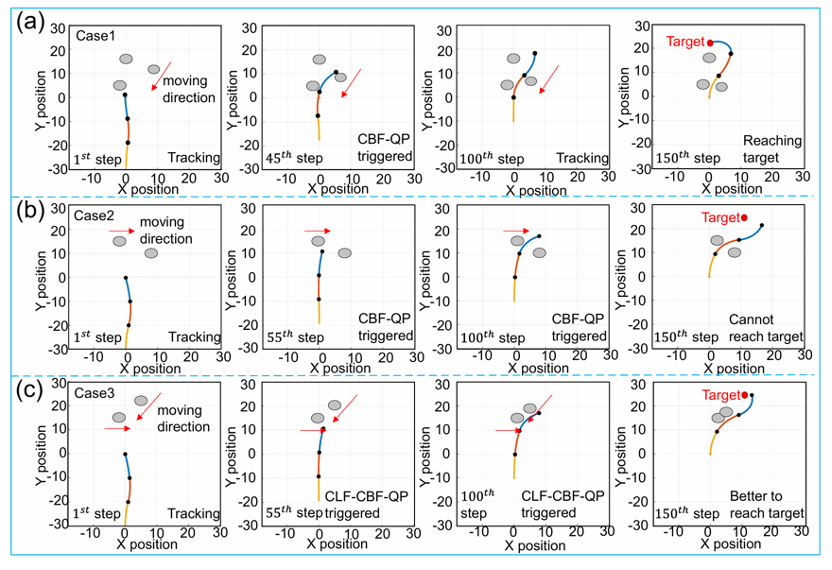
圖:CLF-CBF-QP與CBF-QP動態避障對比
開源實現:論文提供了完整的開源代碼,涵蓋運動規劃、避障算法及仿真測試模塊,為連續體機器人社區的研究與應用提供了實用工具,詳情請見:https://github.com/bentferrari/Online-Planning-CR
?
理工學院參與作者:
第一作者:季廣霖,2025屆博士畢業生,博士期間主要從事連續體機器人控制以及運動規劃研究工作。其研究成果發表在IEEE Transactions on Robotics, IEEE Transactions on Industrial Electronics, IEEE Robotics and Automation Letters, IEEE IROS, IEEE AIM, IEEE EMBC,Cyborg and Bionic Systems等國際知名期刊與會議。
通訊作者:孫正隆,香港中文大學(深圳)理工學院助理教授,校長青年學者,博士研究生導師。
?
論文六
題目:Efficient Underwater Object Detection With Enhanced Feature Extraction and Fusion(高效水下目標檢測與增強的特征提取和融合)
摘要:水下目標檢測在環境監測、資源勘探和自主水下航行器(AUV)導航等領域至關重要。然而,由于水下成像條件嘈雜、光照多變和背景復雜,精確檢測小型目標仍然充滿挑戰。針對這些難題,本文提出了一個名為“自適應殘差注意力網絡”(ARAN)的優化深度學習框架,旨在增強對復雜水下環境中微小目標的檢測與精確識別能力。
ARAN框架的核心是一個創新的“融合PANet”(Fusion PANet),它通過有效地區分目標與背景來優化空間特征。該框架集成了三個關鍵的新模塊:(1)多尺度特征注意力(Multi-Scale Feature Attention, MFA),用于增強低級特征的提取;(2)高低特征殘差學習(High-Low Feature Residual Learning, HFRL),通過跨維度交互捕捉像素級關系;(3)自適應多級特征聚合(Adaptive Multi-Level Feature Aggregation, AMFA),動態調整融合權重,以促進漸進式多級特征融合,并緩解多尺度集成中的沖突,確保小目標不會被忽略。
在四個基準數據集上的大量實驗證明,ARAN的性能顯著優于主流模型。特別是在CSIRO數據集上,ARAN實現了98%的mAP50,精確率、F2分數和召回率均達到94.7%。這些結果證實了該模型在水下目標檢測方面具有卓越的準確性、魯棒性和效率,凸顯了其在復雜水下環境中實際部署的巨大潛力。
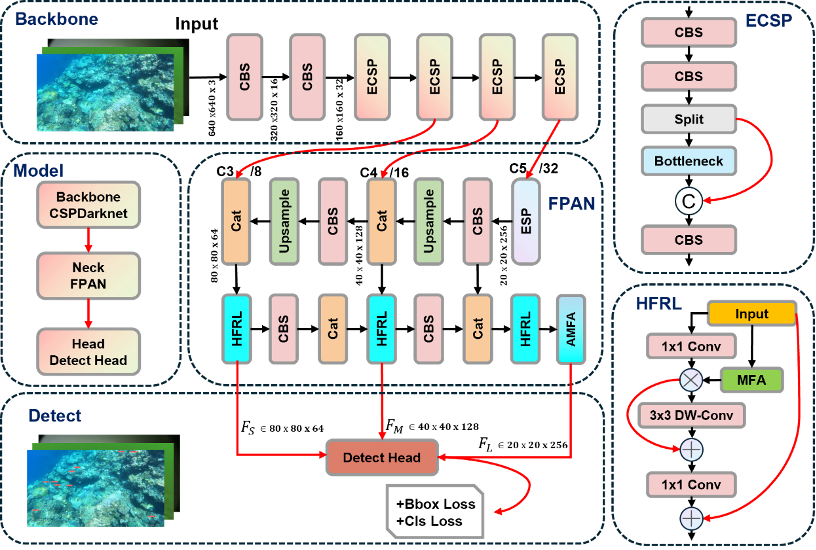
圖:網絡結構
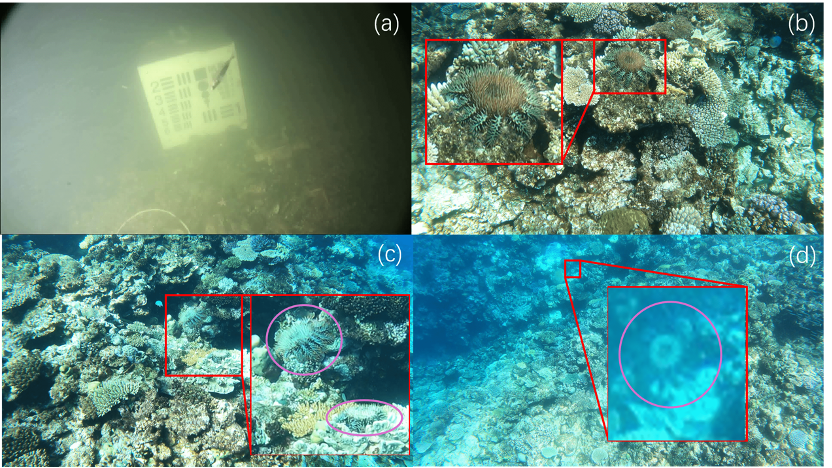
圖:識別結果
?
理工學院參與作者:
第一作者:李紹銘,2024級計算機與信息工程專業在讀博士生,導師為理工學院鐘仿洵教授。主要研究方向為基于學習的三維感知與交互、醫療機器人視覺導航。
通訊作者:鐘仿洵,香港中文大學(深圳)理工學院助理教授,人工智能學院兼職教授,博士生導師(副研究員),校長青年學者。
由鐘仿洵教授作為組織者之一的研討會“Soft Tissue Manipulation In Robotic Surgery(面向機器人輔助手術的軟組織自主操控技術)”也被IROS 2025接收,研討會將探討機器人軟組織操作的前沿挑戰與最新進展。組織安全操作是最常見的普外科手術類型之一,其自動化對于進一步提升機器人手術的精確性、可靠性和安全性至關重要。近年來,機器人軟組織操作雖已取得重大突破,但由于軟組織固有的復雜性(如非線性彈性、不同組織及患者間的力學特性差異等),要實現穩定可靠的操作仍面臨諸多挑戰。研討會將重點圍繞精確建模與仿真、實時感知與交互、魯棒控制策略、機器人設計、智能決策能力等關鍵領域展開討論。詳情請見:https://sites.google.com/view/iros25-softtissuemanipulation/home
?
論文七
題目:EmbodiedAgent: A Scalable Hierarchical Approach to Overcome Practical Challenge in Multi-Robot Control
摘要:本文提出了 EmbodiedAgent,一個面向異構多機器人的分層控制框架,旨在解決大模型在處理反物理事實任務時易產生幻覺的問題。該方法融合了下一步動作預測范式與結構化記憶系統,能夠將復雜任務動態分解為可物理性執行的機器人技能,并實時驗證動作是否符合環境約束。
為支持訓練與評估,我們構建了 MultiPlan+ 數據集,涵蓋 100 個場景、超過18,000條帶注釋的規劃實例,其中包含部分反事實任務,用于緩解幻覺風險。除此之外,本文提出了機器人規劃評估框架(RPAS),結合自動化指標與大語言模型輔助的專家評估,以全面衡量模型性能。實驗結果顯示,EmbodiedAgent 在多個基準任務中均優于現有先進方法,RPAS 得分達到 71.85%,并在真實辦公服務任務中展現出多機器人的長時序協作控制與執行能力。
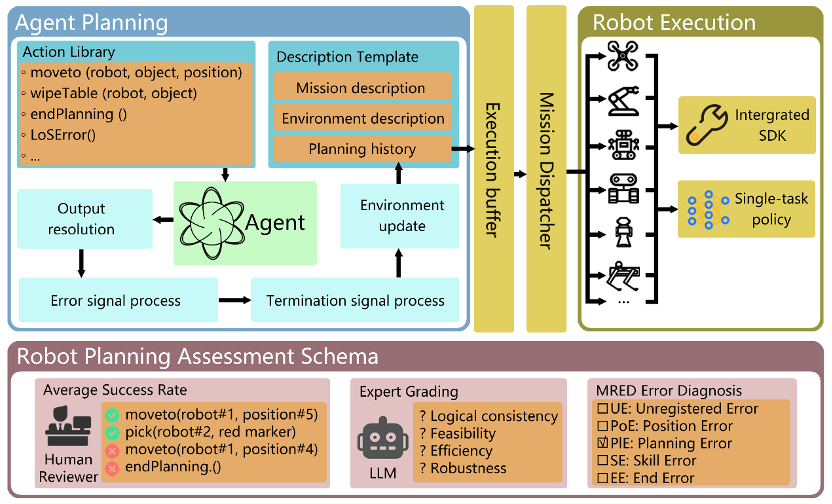
圖:EmbodiedAgent的渠道
?
理工學院參與作者:
第一作者:萬瀚文,2025屆計算機與信息工程專業碩士畢業生,即將繼續攻讀計算機與信息工程專業博士學位,導師為理工學院冀曉強教授。主要研究方向為具身智能控制、大模型和強化學習控制等。
獨立通訊作者:冀曉強,香港中文大學(深圳)理工學院研究助理教授,東盟-中國人工智能實驗室首席科學家。
其他作者包括理工學院碩博學生:林澤昕、吳東昊、成就