理工學院俞江帆教授團隊在Nature Machine Intelligence發表文章
近日,香港中文大學(深圳)理工學院俞江帆教授團隊在Nature Machine Intelligence發表以“Active Exploration and Reconstruction of Vascular Networks Using Microrobot Swarms”為題的文章,俞江帆教授為文章獨立通訊作者。
Active Exploration and Reconstruction of Vascular Networks Using Microrobot Swarms
原文鏈接:https://www.nature.com/articles/s42256-025-01012-y
?
期刊介紹
在科學探索、醫療健康、疾病診斷,以及構建安全可持續的城市、交通和農業體系等諸多領域,機器智能蘊含著無限潛力,能夠極大提升人類的能力、拓展知識邊界。Nature Machine Intelligence是Nature系列旗艦級大子刊,發表機器學習、機器人和人工智能等相關領域的高水平科研成果和評論文章,探索并闡述這些領域對其他科學學科,以及社會與產業諸多層面所產生的深遠影響。
?
研究背景
血管造影術是血管內介入治療過程中的一項關鍵技術,對血管異常及病變部位的精準定位起著重要作用。在臨床場景中,造影劑依靠血流向下游被動擴散,在X光成像的輔助下可顯影血管網絡形態。然而,在栓塞的血管分支,血流速度緩慢甚至停滯,造影劑難以有效向其中擴散,從而導致成像效果不佳甚至無法成像。對于靜脈血管網絡和淋巴管系統,腔道網絡特征由細小分支集合至大支流,在此類系統中,位于造影劑注射點上游的區域無法逆流探索,這一問題在門靜脈血栓、淋巴瘺等病癥的診斷中尤為突出。由于缺乏完整、清晰的血管造影圖像,部分介入手術過程極度依賴醫生的臨床經驗,存在判斷難、風險高的問題。
本工作引入磁性微型機器人集群作為載體,開發了復雜三維腔道的主動探測與結構重建策略,在磁場主動引導下可以實現精準、完整的三維血管網絡成像,重建完整血管網絡的三維結構,可以大幅提升全場景造影效果,幫助醫生精準定位病變血管內的血栓、狹窄部位以及滲漏點,是后續精準介入治療的技術基礎。
?
重點內容
? 核心技術:主動探索算法
研究團隊提出了一種主動探索策略,利用磁性納米顆粒集群作為主動造影載體,突破被動擴散的物理限制,實現對三維血管網絡的完整成像與精準重建,如圖2所示。在本文所提出的探索策略引導下,微集群能夠逆血流方向運動,或主動深入堵塞血管網絡內部,從而實現全場景造影探索。
主動探索策略的核心在于主動探索算法,該算法通過動態圖像處理、分支節點識別與決策邏輯,構建實時更新的血管網絡拓撲結構(圖3)。研究團隊設計了動態ROI (Region of Interest) 管理,通過雙視角(俯視/側視)圖像動態追蹤集群擴散,消除血管折射、電磁線圈遮擋等干擾。在探索過程中,算法采用深度優先決策機制,優先探索集群擴散速度快的分支,探至最末端即回溯至上一個未探索節點,直至遍歷所有節點,即可探明全部血管網絡(圖4)。決策邏輯基于分支點的動態優先級(如擴散速度)和血管樹狀數據結構,確保探索的高效性與全面性。此外,研究團隊還設計了樹狀矩陣,記錄分支點坐標、類型、標識符、擴散速度及狀態,通過分支標識符構建層級化拓撲,確保節點可靠性。
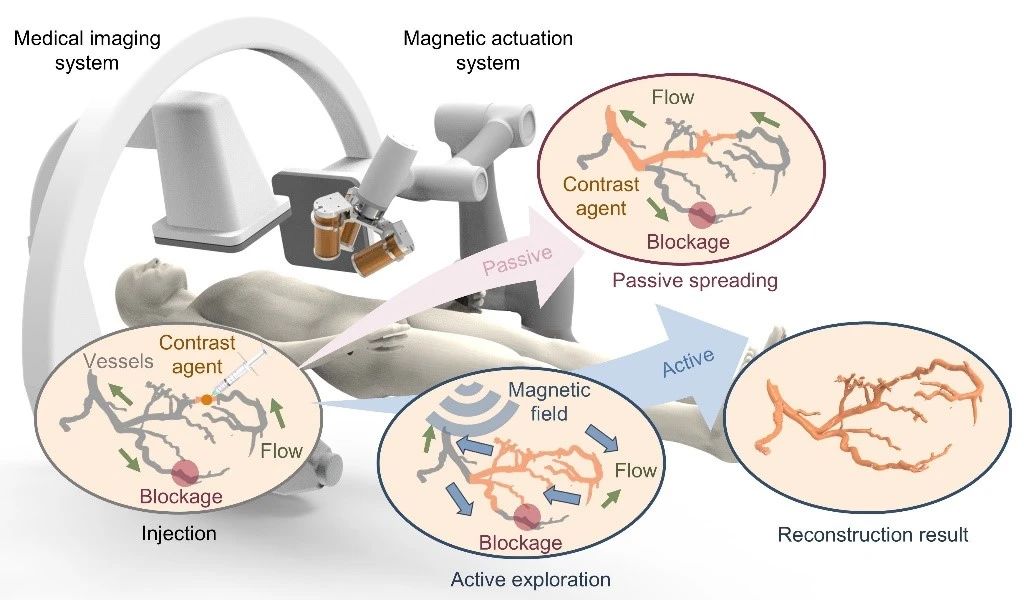
文章總體核心
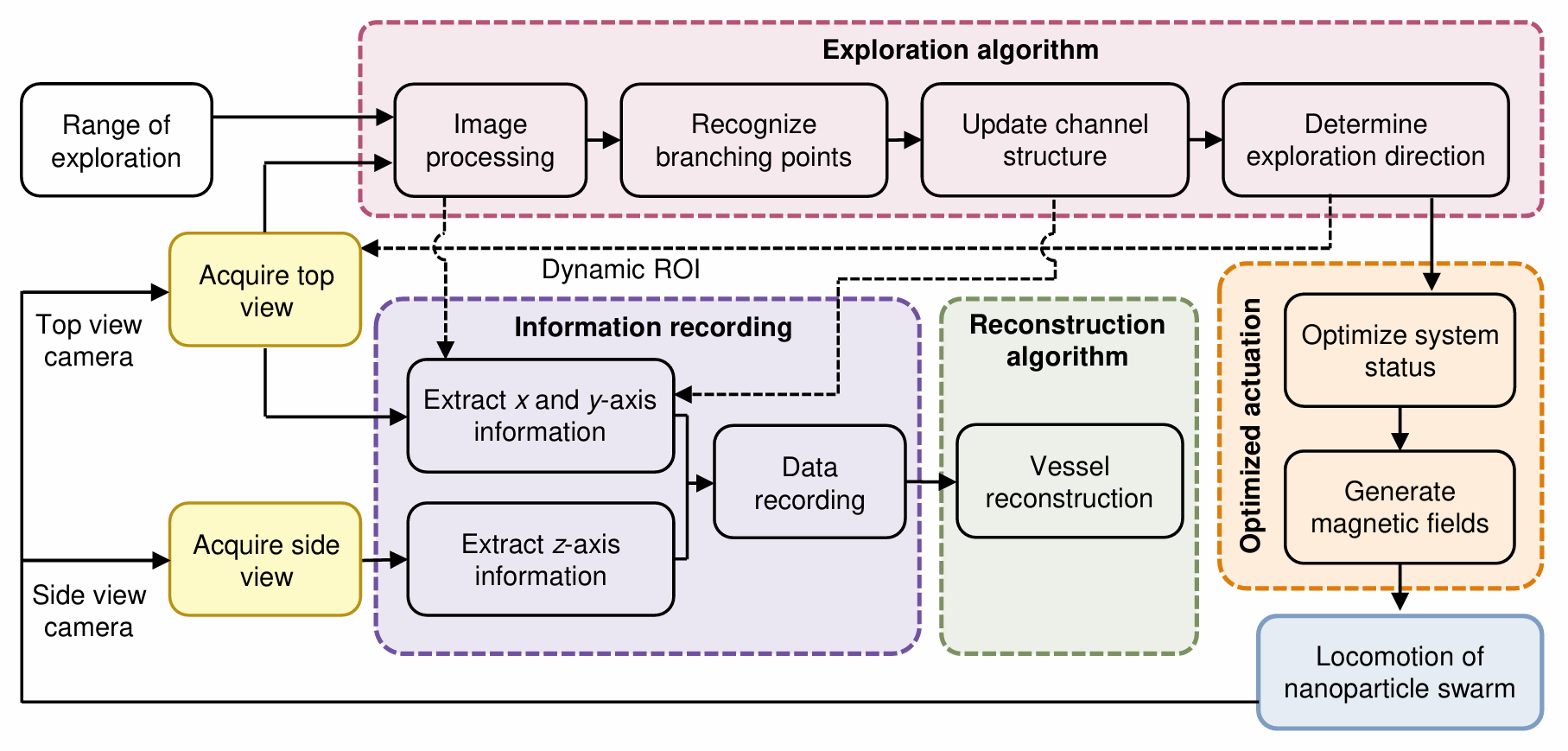
主動探索與重構策略的算法邏輯框圖
?
? 磁性微集群的運動控制
為了讓磁性納米顆粒集群能夠被高效驅動并適應不同血管環境,研究團隊開發了一種自適應磁場驅動平臺。通過旋轉磁場調控,磁性納米顆粒形成穩定的集群并實現可控運動,采用三線圈移動式磁場設計,結合集群優化(PSO)算法,動態調整線圈位置,同時保障磁場強度并避免成像視野遮擋。通過實時反饋控制,優化線圈布局以適應長距離驅動需求,確保集群在復雜血管網絡中的高效運動(圖 5)。
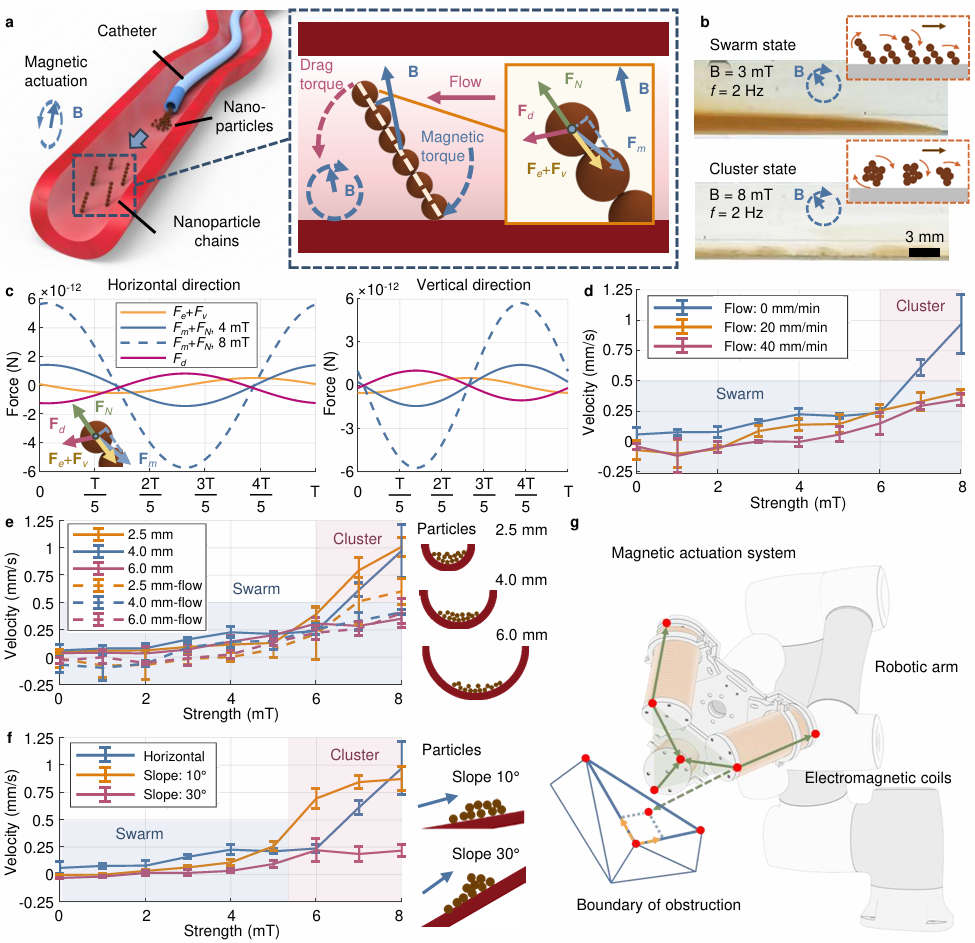
磁性納米顆粒集群建模與磁驅動平臺設計
?
? 三維血管網絡重建算法
在探索過程中,研究團隊提出了一種基于成像的三維重建算法,用于獲取血管網絡的三維網絡結構。在探索過程中,系統通過點云處理并連接選定分支,結合距離、方向角及閾值約束,實現血管網絡的高精度三維重建。算法區分閉合分支(連接已知節點)與開放分支(沿預設方向延伸),通過迭代選擇最優路徑,最小化分支連接成本。采用基于點云的最小成本算法,確保三維重建的準確性與完整性。
? 實驗驗證:主動探索策略的顯著優勢
為了驗證主動探索策略的有效性,研究團隊在血管模型和淋巴管模型中進行了實驗驗證。在血管模型的對照實驗中,當微集群僅依靠被動擴散進行造影時,多條分支因為無流速或者逆流條件,無法被探明,最終僅能成像順流分支,遺漏了逆流及堵塞區域。主動探索組中,則完成了全部7條分支探索,包括逆流分支和零流速堵塞分支。對比兩組結果,主動探索組中所探明的血管總長度較被動擴散組提升46.1%,完整探索了區域內所有的血管分支(圖6,7)。在淋巴管模型實驗中,主動探索策略在復雜淋巴管網絡結構中也能實現全覆蓋;而被動擴散組中,造影劑未能進入8個無流速或逆流分支。主動探索組重建長度較被動組提升120.7%(圖8,9),進一步證明了該策略在復雜腔道網絡中的穩定性。
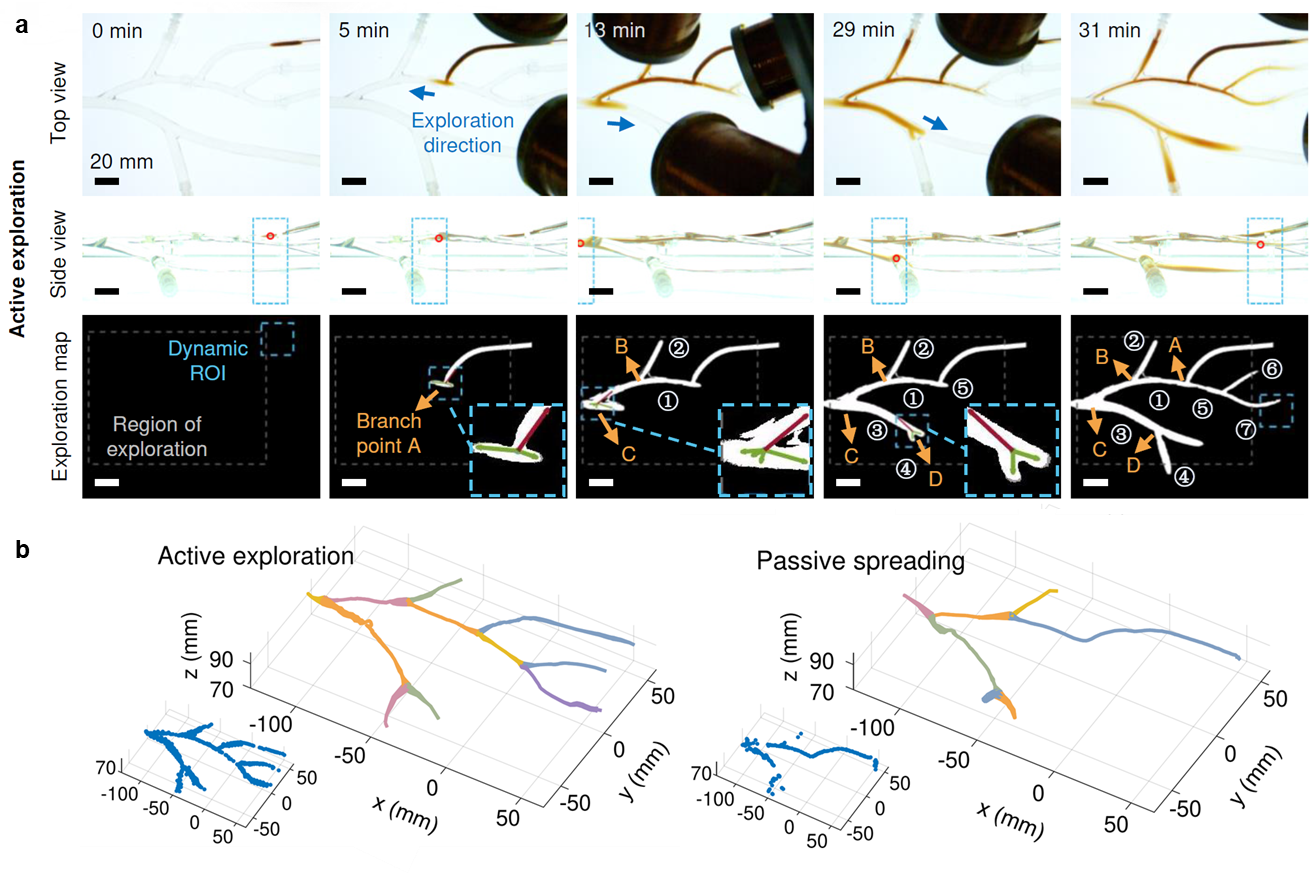
血管網絡模型內的集群主動探索實驗驗證與血管重建
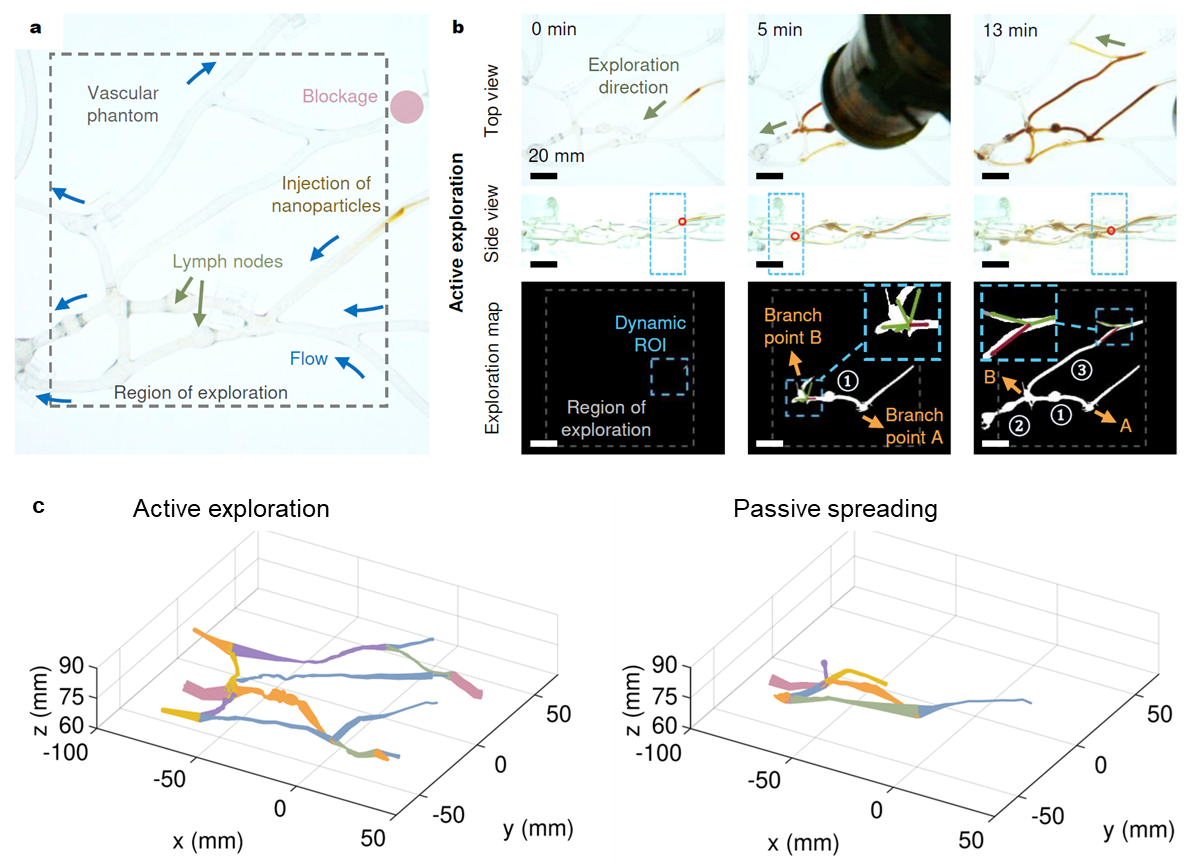
淋巴管網絡模型內的集群主動探索實驗驗證與重建結果
?
? 未來展望:臨床應用的廣闊前景
主動探索策略的提出,為血管成像領域帶來了新的突破。該技術不僅能夠精準定位血管病變,如血栓、狹窄及瘺管,還能與X射線、MRI、熒光成像等多模態影像技術結合,適配不同臨床場景。研究團隊將進一步優化完善該技術,逐步向實際臨床應用轉化推進。
?
作者簡介

文章通訊作者為香港中文大學(深圳)理工學院助理教授、深圳市人工智能與機器人研究院(AIRS)微納機器人中心主任俞江帆。
俞江帆是香港中文大學(深圳)理工學院助理教授、校長青年學者、AIRS微納機器人中心主任。他是國家高層次青年人才,主持國家重點研發計劃青年科學家、國家自然科學基金、廣東省面上、深圳市重點等項目。他是招商局-AIRS醫療機器人未來產業聯合實驗室學術帶頭人,擔任CCF智能機器人專委會執行委員、IEEE高級會員。他的研究主要集中在醫用微型機器人領域,至今發表了70余篇頂級期刊及會議文章、2本專著,發表文章包括Nature Machine Intelligence、Science Advances、Nature Communications、IJRR、TRO、Advanced Materials等。他獲得了多個有影響力的獎項,包括IEEE RAS Early Academic Career Award、IROS最佳學生會議論文獎,國際基礎科學大會前沿科學獎、吳文俊人工智能科技獎自然科學獎二等獎、中國電子學會自然科學二等獎、百度全球華人AI青年學者、IEEE 3M-NANO Rising Star Award等。他擔任Science Robotics、Science Advances、Nature Communications、PNAS等多個頂級期刊和會議的審稿人。
?

本文第一作者為原AIRS助理研究員杜星洲。
杜星洲博士于2021年取得香港中文大學博士學位,于同年加入深圳市人工智能與機器人研究院,任助理研究員,現任大連理工大學副教授。以第一作者或共同第一作者發表文章9篇,包括Nature Machine Intelligence、IEEE Transactions on Robotics、IEEE/ASME Transactions on Mechatronics、ACS Nano等,獲授權美國專利一項、中國發明專利兩項,已公開美國專利一項,以第一作者身份在國際會議IEEE International Conference on Advanced Robotics and Mechatronics (ICARM) 2020中獲得Toshio Fukuda Best Paper Award in Mechatronics獎項。
?

共同第一作者為香港中文大學(深圳)理工學院材料科學與工程專業在讀博士生王一斌。
王一斌,本科畢業于哈爾濱工業大學(威海),碩士畢業于卡內基梅隆大學,目前在香港中文大學(深圳)俞江帆教授團隊攻讀博士學位。主要研究方向為小尺度磁性軟體機器人的結構設計、工作機理、驅動模式以及基于磁性軟體機器人的生物醫療應用。以第一作者、共同一作身份已在Nature Machine Intelligence、Nature Communications、Advanced Materials、 Advanced Science等國際頂級期刊上發表工作。?
?
新聞來源:理工學院