林天麟教授在模塊化自重構(gòu)機(jī)器人領(lǐng)域取得重要進(jìn)展
香港中文大學(xué)(深圳)理工學(xué)院、深圳市人工智能與機(jī)器人研究院林天麟教授團(tuán)隊(duì)專注于模塊化自重構(gòu)機(jī)器人的研究,近年來在知名國際學(xué)術(shù)期刊上發(fā)表了一系列創(chuàng)新成果。
近日,林教授團(tuán)隊(duì)在模塊化自重構(gòu)機(jī)器人領(lǐng)域再獲突破,在國際頂級期刊International Journal of Robotics Research(IJRR)上連續(xù)發(fā)表了2篇論文。這是林教授團(tuán)隊(duì)繼2023年創(chuàng)下“單年發(fā)表5篇T-RO論文”的歷史之后的又一里程碑,再次證明了團(tuán)隊(duì)的技術(shù)積累與創(chuàng)新能力,也彰顯了香港中文大學(xué)(深圳)在粵港澳大灣區(qū)乃至國內(nèi)機(jī)器人領(lǐng)域的科研實(shí)力。
?
期刊介紹
International Journal of Robotics Research(IJRR)是機(jī)器人領(lǐng)域的高水平學(xué)術(shù)期刊,專注于發(fā)布關(guān)于機(jī)器人技術(shù)和相關(guān)領(lǐng)域的最新研究成果。IJRR創(chuàng)刊于1982年,是該領(lǐng)域第一本學(xué)術(shù)期刊。自創(chuàng)刊以來,IJRR致力于發(fā)表原創(chuàng)性、深入思考和引人入勝的論文,以卓越的學(xué)術(shù)質(zhì)量和廣泛的學(xué)術(shù)影響力在國際學(xué)術(shù)界享有極高聲譽(yù)。IJRR 2023全年共收錄原創(chuàng)論文57篇,其中5篇來自中國(含港澳臺地區(qū))。
?
一、解析模塊化自重構(gòu)機(jī)器人:機(jī)構(gòu)與設(shè)計(jì)
2024年10月,IJRR在線發(fā)表題為“Decoding modular reconfigurable robots: A survey on mechanisms and design”的論文。該論文提出了一個創(chuàng)新且統(tǒng)一的結(jié)構(gòu)化框架,解決了模塊化自重構(gòu)機(jī)器人設(shè)計(jì)中的標(biāo)準(zhǔn)化和一致性問題。香港中文大學(xué)(深圳)博士生梁冠琪為論文第一作者,林天麟教授為論文獨(dú)立通訊作者。
模塊化自重構(gòu)機(jī)器人可通過調(diào)整模塊的分布和連接方式,重新構(gòu)型以適應(yīng)不同的任務(wù)和環(huán)境需求。其模塊化與可重構(gòu)性賦予系統(tǒng)強(qiáng)大的多功能性、容錯能力和經(jīng)濟(jì)性,在多領(lǐng)域應(yīng)用中展現(xiàn)出廣闊前景。隨著技術(shù)進(jìn)步和設(shè)計(jì)理念的多樣化,模塊化機(jī)器人種類日益增多,不同形態(tài)和功能的機(jī)器人使得該領(lǐng)域分類體系日趨模糊,亟需建立一套科學(xué)嚴(yán)謹(jǐn)且符合當(dāng)前技術(shù)水平的標(biāo)準(zhǔn)化分類方法,以解決機(jī)器人設(shè)計(jì)中的標(biāo)準(zhǔn)化和一致性問題。
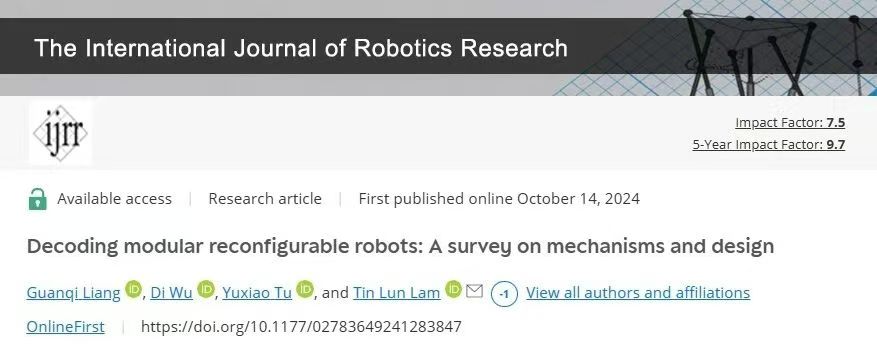
本文對過去近40年來模塊化自重構(gòu)機(jī)器人硬件與設(shè)計(jì)的進(jìn)展進(jìn)行了全面回顧,提出了一種創(chuàng)新且統(tǒng)一的概念框架,以深入理解模塊化自重構(gòu)機(jī)器人系統(tǒng)的硬件組成。該框架由三個關(guān)鍵要素構(gòu)成:連接器、執(zhí)行器和同質(zhì)性。通過這一三分框架,本文為理解模塊化自重構(gòu)機(jī)器人硬件設(shè)計(jì)的多樣性提供了一種直觀且結(jié)構(gòu)化的視角,進(jìn)而對該領(lǐng)域進(jìn)行了系統(tǒng)性分類與解讀。框架不僅揭示了模塊化自重構(gòu)機(jī)器人的基本設(shè)計(jì)理念與特性,還通過創(chuàng)新的分類方法分析了不同設(shè)計(jì)的技術(shù)優(yōu)勢與功能特點(diǎn),推動了系統(tǒng)功能的優(yōu)化。此外,本文還評估了現(xiàn)有廣泛使用的分類方法與新框架之間的一致性,探討了它們之間的相互關(guān)系。通過強(qiáng)調(diào)基本屬性,該框架為設(shè)計(jì)原則的確立提供了理論支持,并為硬件開發(fā)與系統(tǒng)優(yōu)化提供了指導(dǎo)。本文還回顧了該領(lǐng)域的發(fā)展歷程,探討了當(dāng)前的研究現(xiàn)狀與面臨的挑戰(zhàn),為模塊化自重構(gòu)機(jī)器人領(lǐng)域提供了重要洞見。
論文鏈接:https://doi.org/10.1177/02783649241283847
?
二、模塊化自重構(gòu)機(jī)器人快速準(zhǔn)靜態(tài)穩(wěn)定性檢測
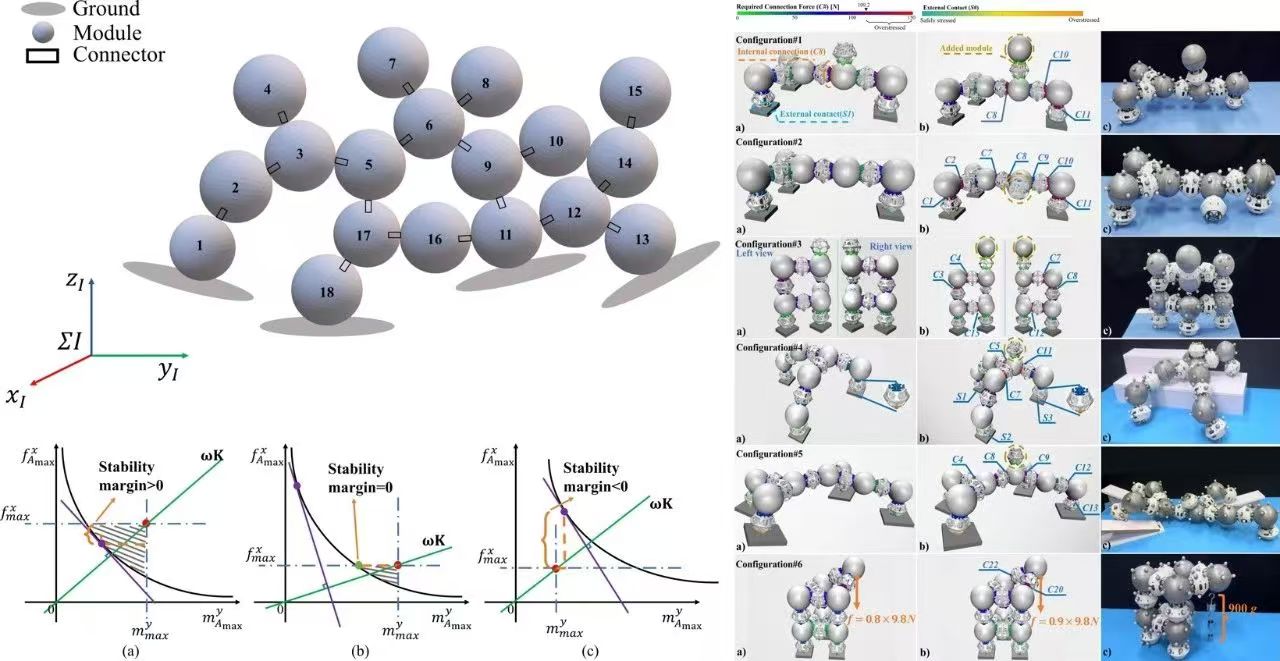
2024年11月,IJRR在線發(fā)表題為“Linear-time quasi-static stability detection for modular self-reconfigurable robots”的論文。該論文提出了一種適用于任意構(gòu)型的穩(wěn)定性檢測算法,為模塊化自重構(gòu)機(jī)器人系統(tǒng)的在線優(yōu)化和運(yùn)動規(guī)劃奠定基礎(chǔ)。香港中文大學(xué)(深圳)博士生吳迪為論文第一作者,林天麟教授為論文獨(dú)立通訊作者。
構(gòu)型穩(wěn)定性問題是制約模塊化自重構(gòu)機(jī)器人從演示走向?qū)嶋H應(yīng)用的關(guān)鍵技術(shù)之一。傳統(tǒng)的有限元方法難以有效處理冗余約束的互補(bǔ)效應(yīng),且計(jì)算復(fù)雜。本文提出了一種輕量化的準(zhǔn)靜態(tài)穩(wěn)定性檢測方法,首次考慮了環(huán)境摩擦力和非平坦地形對機(jī)器人內(nèi)部穩(wěn)定性的影響,并定義了內(nèi)部穩(wěn)定裕度及其計(jì)算方法。該方法為模塊化自重構(gòu)機(jī)器人系統(tǒng)的在線構(gòu)型優(yōu)化和運(yùn)動規(guī)劃提供了基礎(chǔ),也為并聯(lián)機(jī)構(gòu)中的冗余約束問題提供了新的解決思路。
本文提出了一種適用于非平坦地形和任意構(gòu)型的模塊化自重構(gòu)機(jī)器人線性時間準(zhǔn)靜態(tài)穩(wěn)定性檢測算法。首先,系統(tǒng)地闡述和分析了模塊化自重構(gòu)機(jī)器人系統(tǒng)中存在的內(nèi)部約束,揭示了五種失穩(wěn)模式(四種局部失穩(wěn)和一種整體失穩(wěn))。隨后,研究了單模塊與其他模塊及環(huán)境的交互,推導(dǎo)了模塊的受力穩(wěn)定性條件,并以緊湊矩陣形式表示了系統(tǒng)的整體穩(wěn)定性條件。結(jié)合各向異性連接器約束模型,確定了系統(tǒng)的可行穩(wěn)定狀態(tài)集合。為評估構(gòu)型穩(wěn)定性,提出了連接器特征連接強(qiáng)度模型,分析了連接器的受壓狀態(tài)。基于此,構(gòu)建了一個以最小化構(gòu)型中最大連接器的特征連接強(qiáng)度為目標(biāo)的二階錐規(guī)劃問題,結(jié)合構(gòu)型穩(wěn)定性、連接器約束及環(huán)境約束,優(yōu)化系統(tǒng)穩(wěn)定性。通過求解該優(yōu)化問題,獲得構(gòu)型的臨界穩(wěn)定狀態(tài)和穩(wěn)定裕度,有效預(yù)測可能的連接斷裂點(diǎn)。最后,以團(tuán)隊(duì)提出的模塊化自重構(gòu)機(jī)器人FreeSN為驗(yàn)證對象,進(jìn)行仿真和物理實(shí)驗(yàn),結(jié)果表明該方法能夠快速評估構(gòu)型穩(wěn)定性,并準(zhǔn)確預(yù)測斷裂點(diǎn),驗(yàn)證了方法的有效性和實(shí)用性。
論文鏈接:https://doi.org/10.1177/02783649241286491
?
教授介紹

林天麟,機(jī)器人與智能制造國家地方聯(lián)合工程實(shí)驗(yàn)室常務(wù)副主任,深圳市人工智能與機(jī)器人研究院中心主任,IEEE機(jī)器人與自動化學(xué)會廣州分會副主席。師從港中大(深圳)校長徐揚(yáng)生院士,分別于2006年和2010年在香港中文大學(xué)獲得一等榮譽(yù)學(xué)士學(xué)位和博士學(xué)位。長期從事模塊化機(jī)器人、多機(jī)器人系統(tǒng)及特種機(jī)器人的研究工作,至今在Nature Communications、IJRR、T-RO、TPAMI等機(jī)器人與人工智能領(lǐng)域知名期刊及會議發(fā)表論文100余篇,獲熊有倫智湖優(yōu)秀青年學(xué)者獎、TMECH年度最佳論文獎、IROS機(jī)器人機(jī)構(gòu)設(shè)計(jì)最佳論文獎。擔(dān)任TASE、JFR、《機(jī)器人》等多個知名期刊及會議的副編輯。作為項(xiàng)目負(fù)責(zé)人,主持國家自然科學(xué)基金委、科技部、廣東省科技廳、深圳市科創(chuàng)委的多項(xiàng)科研課題。其團(tuán)隊(duì)的相關(guān)研究成果多次被中央電視臺、路透社、探索頻道、IEEE Spectrum等眾多國際知名媒體報道。
?